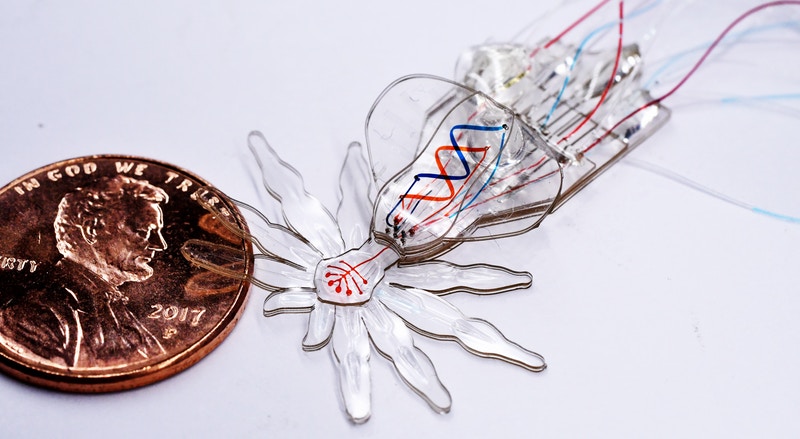
A team of engineers from Harvard and Boston University created a tiny soft spider robot that is highly manoeuvrable, thanks to an entirely new fabrication technique.
The team published their work in Advanced Materials, presenting the device with micrometer-scale features as a robot that could operate in very small and inaccessible areas.
The process of building it is complex and it takes place over several days filled with layering and channeling.
The robot is known as MORPH (Microfluidic Origami for Reconfigurable Pneumatic/Hydraulic) and it was created via soft-lithography in order to bring to life the silicone shape.
Then, laser micro-machining was used to dig very small channels into its body and, by using a technique called injection induced self folding, the channels are pressurized and cured with resin and UV light, in order to give the robot its final shape.
The limbs of the robot are actuated using water and the colors they’re painted in were inspired by the Australian peacock spider.
This is the first time a robot that is both flexible and soft and of such capacity has ever been created on such a small scale and the researchers hope that their work can help in the domains of surgery, especially microsurgery, biomedical applications and perhaps even in wearables.
You don’t like the idea of tiny, soft spiders crawling all over you? Tough luck, because if the project takes off, they’ll be helping in our hospitals.
Follow TechTheLead on Google News to get the news first.