Robots can be jerks – just watch this woman’s ordeal with them. They have no idea how to behave in society or on the street and no clue as to how to walk straight or avoid obstacles. But for Stanford scientists these are not simple, annoying facts, just challenges they have to overcome. That’s how Jackrabbot was born, a robot whose primary objective is to handle a crowd #machinemagic
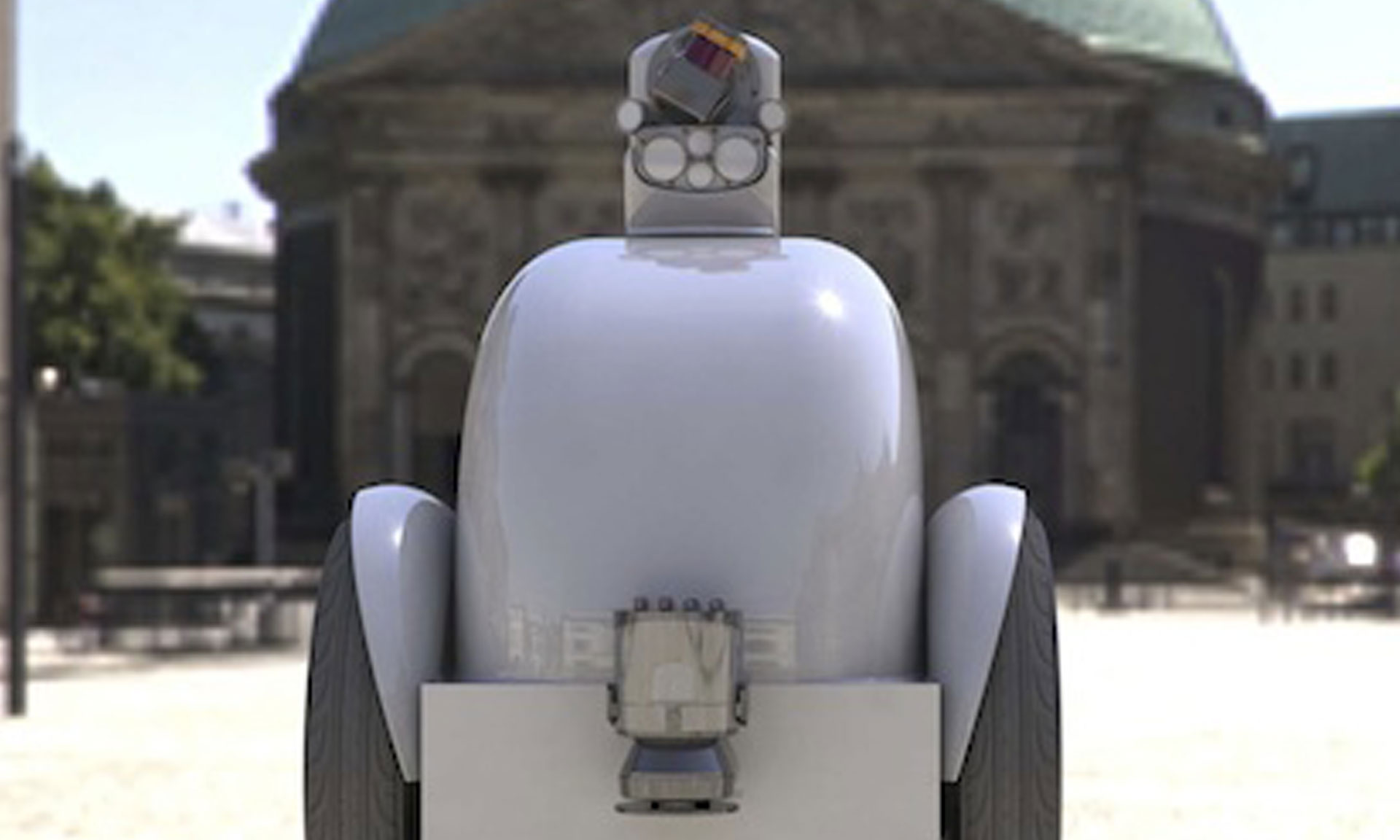
Jackrabbot is manually controlled now, a digital “beast” composed of a Segway, stereo cameras, laser scanner and GPS. He knows speeds and distances, but not how to avoid people and make his way through a crowd – yet. One team at Stanford is planning to test on him exactly this power, using computer vision algorithms that track and aim to predict pedestrian movements.
It’s not an easy job; there are alot of variables – from time of day, to bikers, strollers and of course, widths of wakways. That said, their software outperforms the majority found on the market today and inside Jackrabbot, could accurately predict motions in space. Soon, the robot should politely give room for a mother and her baby stroller or an elderly couple.
According to researcher Alexandre Alahi for TechCrunch, they “are planning to integrate our socially aware forecasting model in the robot during summer and have a real-time demo by the end of the year.”
Follow TechTheLead on Google News to get the news first.