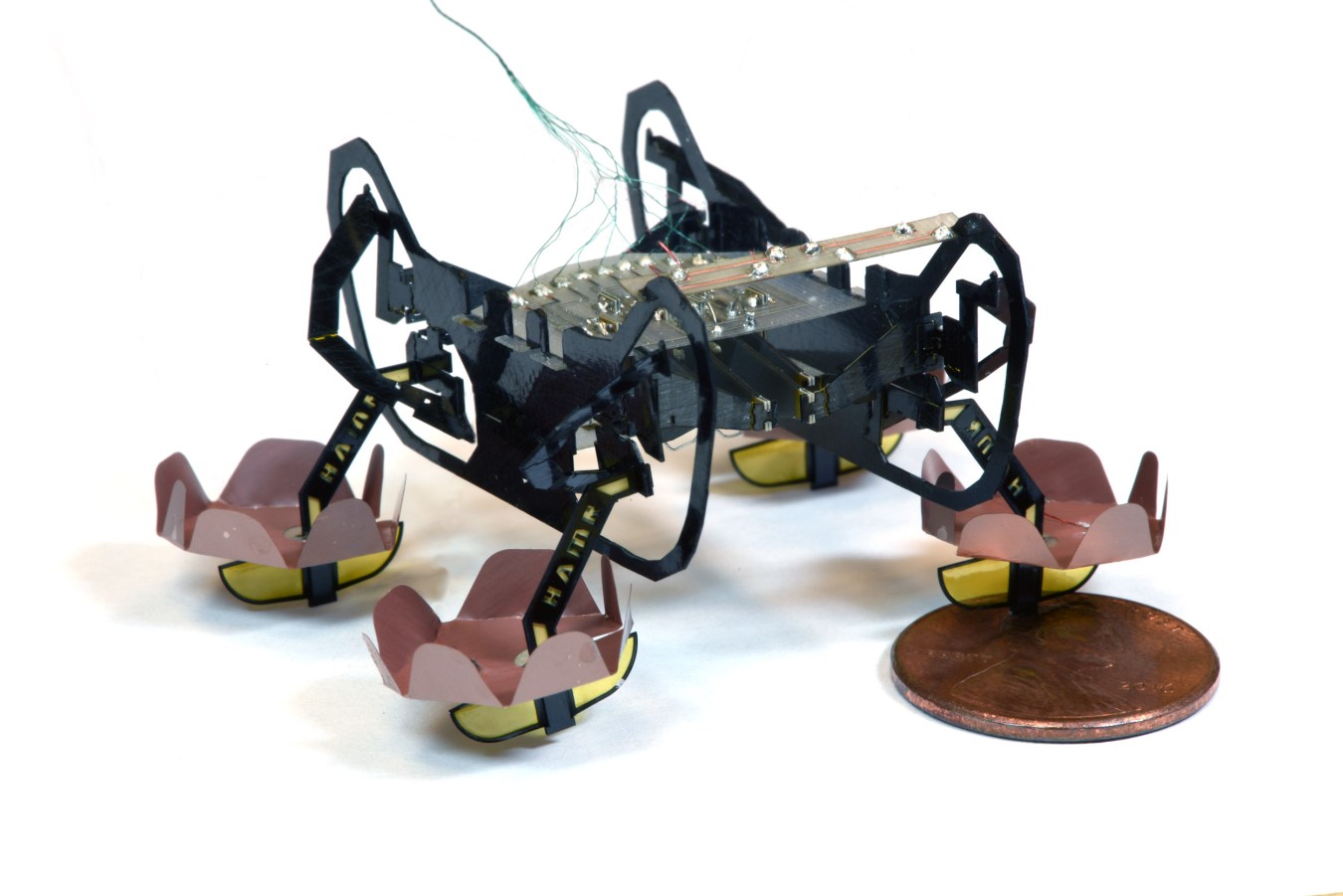
Harvard’s Ambulatory Microrobot (HAMR, for short), is a tiny robotic cockroach that can walk on land, under- and on the surface of water.
The HAMR relies on surface tension and surface tension-induced buoyancy in order to achieve these feats. Also, it uses multifunctional footpads to move around. They look like tiny flip-flops, it’s really cute, believe me.
If it is walking across water and the need to sink arises, the HAMR applies some voltage to break water surface. It is very similar in its gait to a diving beetle when moving underwater, which allows the robot to swim forward and turn effectively.
Kevin Chen is a postdoc at the Harvard John A. Paulson School of Engineering and Applied Sciences (SEAS) and he said about the HAMR research that…
“This research demonstrates that microrobotics can leverage small-scale physics — in this case surface tension — to perform functions and capabilities that are challenging for larger robots.”
Of course, a lot of the robot’s success comes from its size: the HAMR weighs 1.65 grams (hold a paperclip in your hand, that’s how heavy it is) and can carry an additional 1.44 grams of payload without sinking. It it were any bigger than that, supporting it with the help of surface tension would have been a challenge. Any smaller, and it wouldn’t have been able to break surface tension so it can sink.
Further research could improve the bot’s locomotion and give it the ability to return to land without the use of a ramp, as seen in the video above. The only options they have at the moment is to either come up with a jumping mechanism or work their way around gecko-inspired adhesives.
Looking forward to see what the tiny bot will be up to in a while!
Follow TechTheLead on Google News to get the news first.